Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
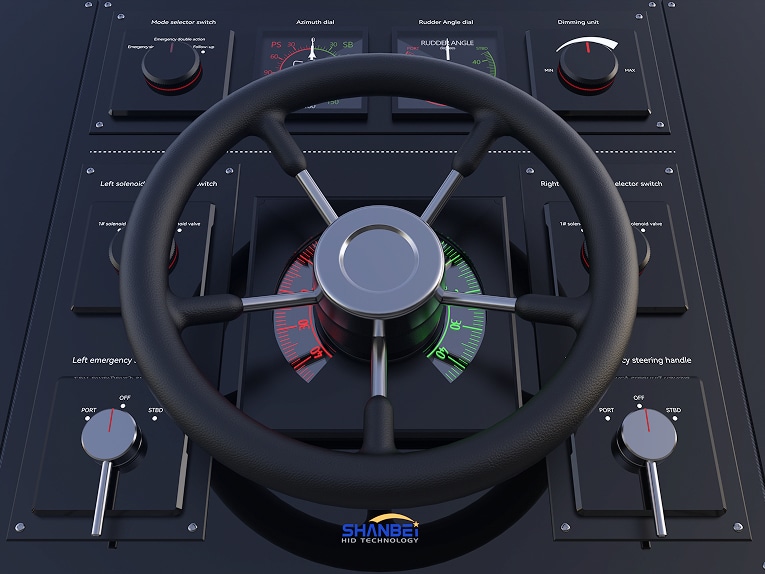
Bedienfeld der Schiffssteuerung
{{{sourceTextContent.subTitle}}}
Die Schalttafel der Schiffsruderanlage ist das Kernstück des Schiffssteuerungssystems, und ihr Design muss an die raue Meeresumgebung angepasst werden, wobei Zuverlässigkeit, Sicherheit und einfache Bedienung berücksichtigt werden müssen
{{{sourceTextContent.description}}}
1. Hardware-Entwurfselemente
1) Anpassungsfähigkeit an die Umwelt
① Schutzart: IP56 wasser- und staubdichtes Design, um Wellen, Salznebel und feuchter Umgebung zu widerstehen.
② Temperaturbeständigkeit und Erdbebensicherheit: breiter Temperaturbereich (-20°C~+60°C), durch den Vibrationstest (wie ISO 6954 Standard), um sich den Schiffsturbulenzen anzupassen.
③ Materialauswahl: Die Schale verwendet korrosionsbeständiges Metall (z. B. Aluminiumlegierung) oder verstärkten Kunststoff, und der interne Kreislauf ist mit drei Anti-Lack beschichtet.
2) Stromversorgung und Schutz
① Redundante Stromversorgung: Unterstützt zwei Stromeingänge (z. B. das Hauptnetzteil und die Pufferbatterie), um sicherzustellen, dass das System auch bei ausgeschaltetem Strom funktionieren kann.
② Überspannungsunterdrückung: TVS-Dioden und Sicherungen sind so konfiguriert, dass sie Spannungsschwankungen im Stromnetz des Schiffes (z. B. 12V/24V DC) ausgleichen.
③EMI/EMC-Schutz: Abschirmungsdesign zur Vermeidung elektromagnetischer Störungen, in Übereinstimmung mit den elektrischen Normen der Schifffahrt (wie IEC 60945).
3) Schnittstelle und Kommunikation
① Unterstützung von Standardprotokollen: Integration des NMEA 0183/NMEA 2000-Protokolls und der Dateninteraktion mit Navigationsgeräten (wie GPS, Kompass).
② Bus-Erweiterung: Schließen Sie das Antriebsmodul über den CAN-Bus oder RS485 an und unterstützen Sie die Kaskadierung von mehreren Geräten.
2. Funktionale Gestaltungselemente
1) Kernsteuerungsfunktion
①Schalter für manuellen/automatischen Modus: Unterstützung der manuellen Notsteuerung (z.B. Griffsteuerung) und des automatischen Fahrsystems (z.B. AP-Verbindung).
② Sicherheitslimit: Software-Limit und mechanischer Limit-Doppelschutz, um ein Überschreiten des Ruderblattes zu verhindern (z.B. ±35° Grenzwinkel).
③ Dynamische Kompensation: automatische Anpassung des Rudereffekts entsprechend dem Schiffstiefgang und den Windwellen (muss den Neigungssensor oder den Wellenkompensationsalgorithmus integrieren).
2) Alarm- und Fehlerbehandlung
① Echtzeit-Überwachung: Anzeige von Ruderwinkelabweichung, Motortemperatur, Hydraulikdruck und anderen Parametern, bei Überschreitung der Grenzwerte werden Ton- und Lichtalarm ausgelöst.
② Automatische Umschaltung: Wenn die Ruderanlage ausfällt, schaltet sie automatisch auf die Standby-Ruderanlage um und benachrichtigt die Brücke.
③ Blackbox-Funktion: Speichert Protokolle über den Betrieb der Rudermaschine (wie Zeit, Winkel und Fehlercode) und unterstützt den Datenexport.
3. Gestaltung der Benutzeroberfläche
1) Interaktion bei der Bedienung
① Physikalische Taste: große, wasserdichte Taste (z. B. Not-Aus, Moduswechsel), geeignet für das Tragen von Handschuhen.
② Grafische Anzeige: heller LCD/LED-Bildschirm, der den Kurs des Schiffes, die Ruderwinkelkurve und den Systemstatus anzeigt.
③ Sprachansage: Im Notfall werden Fehlerinformationen übertragen (z. B. "Ruderanlage überlastet, bitte prüfen").
2) Redundanter Betrieb
① Fernsteuerung: Unterstützung Brücke, Kabine Dual-Position-Steuerung, Schlüsseloperationen müssen doppelt bestätigt werden (z. B. Entriegelung Not-Aus).
② Griff/Knauf: Bieten Sie einen mechanischen Griff für die Notsteuerung, unterstützen Sie die proportionale Steuerung (wie Ruder Winkel und Griff Verschiebung lineare Reaktion).
4. Anpassung an spezielle Szenarien
1) Eisbrecher/Hochseeschiffe
① Tieftemperatur-Startoptimierung: schnelles Aufwachen bei -40°C, das Hydrauliksystem muss so ausgelegt sein, dass es nicht einfriert.
②Hochdruckschutz: Anpassung an die hohen Öldruckanforderungen von Hochsee-Ruderanlagen (z. B. 31,5 MPa).
2) Binnenschiffe
① Vereinfachte Schnittstelle: Entfernung komplexer Funktionen, Beibehaltung der grundlegenden Steuerungs- und Alarmfunktionen, Verringerung der Schwierigkeit der Bedienung.
② Kostengünstige Lösung: die Verwendung eines universellen Rudermaschinenantriebsmoduls, Unterstützung des Modbus-Protokolls und der Marine-SPS-Integration.
5. Test und Wartung
1) Umweltprüfung
① Salzsprühnebeltest (IEC 60068-2-52), feuchter Wärmezyklus (IEC 60068-2-30) zur Überprüfung der Korrosionsbeständigkeit.
② Vibrationstest (sinusförmige Vibration + zufällige Vibration) simuliert Schiffsbetriebsbedingungen.
2) Wartung
① Regelmäßige Wartungserinnerungen.



