Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
L25 USV Durchführung einer Mehrstrahlkartierung an der Brücke Hongkong-Zhuhai-Macao
Der Marine USV OceanAlpha L25 wurde mit einem Teledyne RESON T50-P Fächerecholot T50-P für die Linienverfolgungskartierung ausgerüstet.
Die Hongkong-Zhuhai-Macao-Brücke ist die längste über das Meer führende Brücke der Welt. Ihr Meeresabschnitt beträgt 42 Kilometer, und der Unterwassertunnel ist 35,578 Kilometer lang. Die langfristige Inspektion und Wartung der Brücke ist schwierig und gefährlich, wenn man sich nur auf den manuellen Betrieb verlässt. Der Einsatz autonomer unbemannter Technik kann die Effizienz erheblich steigern und die Sicherheit des Personals gewährleisten.
Mapping-Prozess
Gemäß den Anforderungen des Kunden wurde die Unterwasser-Geländekartierungsaufgabe in einem Wasserbereich von 500 m × 200 m über dem Unterwasserröhrentunnel am Zhuhai-Ende der Brücke durchgeführt, und eine weitere Aufgabe wurde im Wasserbereich innerhalb von 100 m von der Künstlichen Insel West durchgeführt. Der Marine USV OceanAlpha L25 wurde mit einem Teledyne RESON T50-P Fächerecholot T50-P für die Linienverfolgung ausgerüstet.
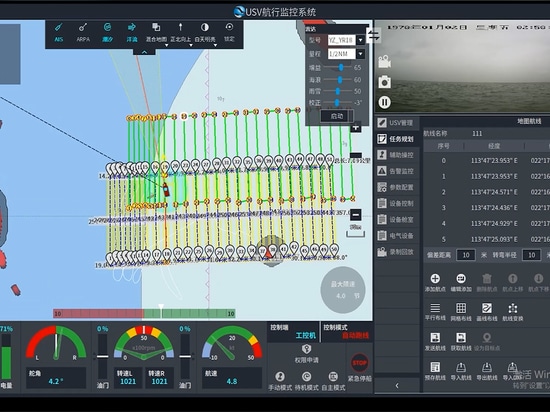
Die L25 USV erreichte das Einsatzgebiet nach 20 Kilometern autonomer Navigation. Techniker legten die Wegpunktlinien gemäß der "GBT 12763.10-2007 Marine Survey Specification" fest: U-Boot-Topographie und Landformvermessung" und "GB 12327-1998 Hydrographische Vermessungsspezifikation".
Die Hauptwegpunktlinien wurden entsprechend der Gesamtrichtung des Zielgebiets festgelegt. Die Ãœberlappung benachbarter Sweeps betrÃ?gt nicht weniger als 10% der Sweepbreite, und die Kontakt-Wegpunktlinie ist nicht kÃ?rzer als 5% der GesamtlÃ?nge der Hauptlinie. Durch Abtasten der beiden Unterwassergebiete erhielt L25 USV die Punktwolkendaten des Unterwassergeländes, die eine Datenunterstützung für die Diagnose von Struktursedimentation und -verformung und Rückverlandung bieten.
Schlussfolgerung
Die Anwendung unbemannter Technologie kann die Betriebseffizienz wirksam verbessern und die Sicherheitsrisiken für das Personal verringern. Die Anwender können periodische Überwachungsaufgaben im System speichern, so dass die USV ihre Navigation auf der Grundlage hochpräziser Positions- und Geschwindigkeitsinformationen intelligent steuern und damit stark repetitive Überwachungsaufgaben durchführen kann. In diesem Modus sind die periodischen historischen Daten, die bei Verwendung desselben Ausrüstungssatzes und desselben Kartierungspfades gebildet werden, zuverlässiger, kontinuierlicher, leicht zu vergleichen und rückverfolgbarer als bei herkömmlichen bemannten Einsätzen.